LavaBot is a dual-faceted mission: A squadron of fully autonomous land and air vehicles will be utilized to climb a volcano and retrieve samples from within it. The air vehicles will launch from the land vehicle, collect a sample, and return to the land vehicle, requiring autonomous launching, landing, sample collection, and other advanced technologies.
What we do
Utilizing robot-to-robot communication, sensor technologies, and robot autonomy, Lavabot aims to collect volcanic samples using a combination of land and air vehicles.
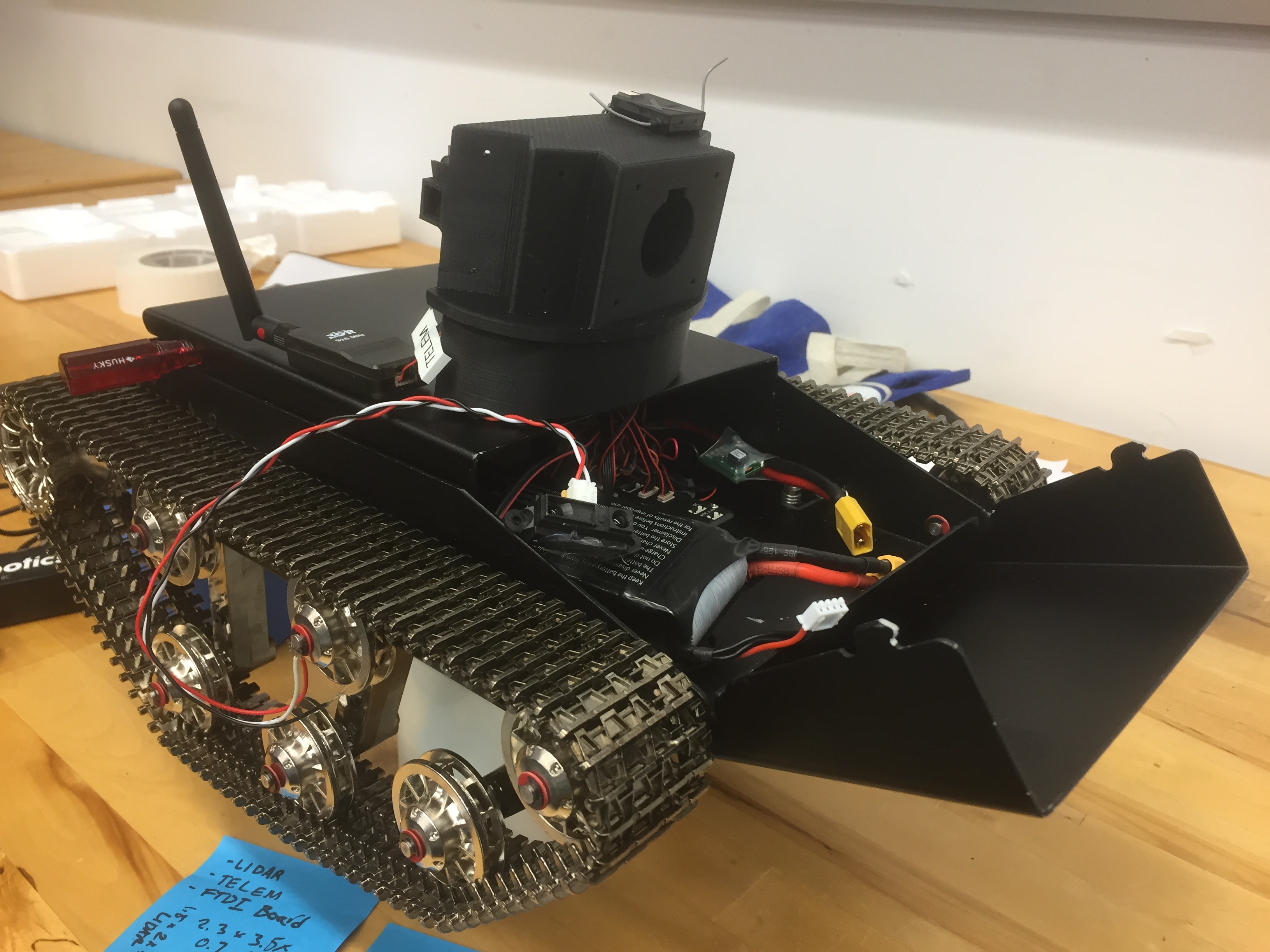
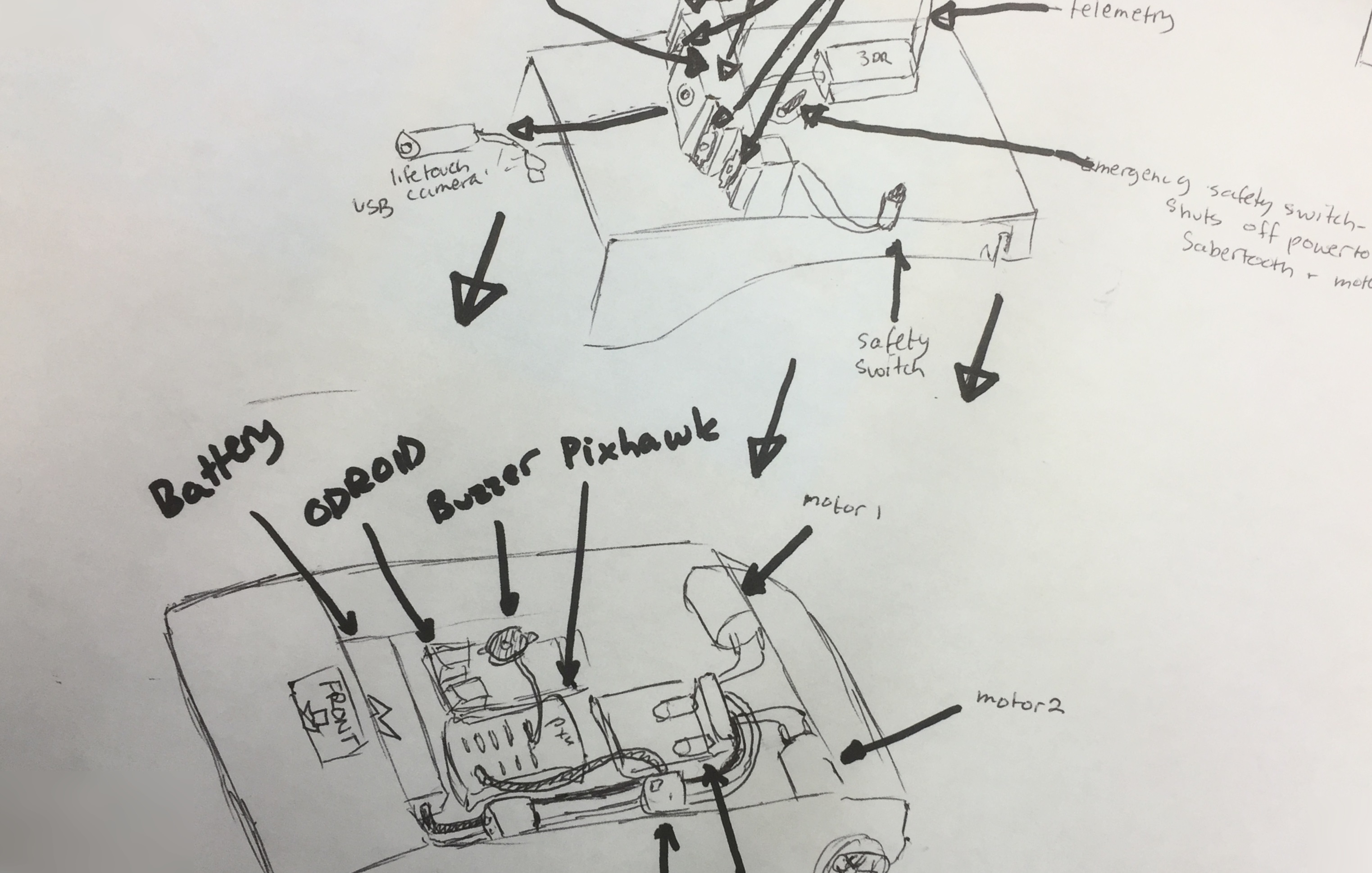
Sam the Rover
Equipped with an infrared camera and a GPS, Sam is the land rover responsible for carrying the hexacopter within collection range of the volcano. It must be able to navigate autonomously, employing wireless communication and obstacle avoidance to safely deliver its aerial counterpart.

Tink the Hexacopter
Tink is the air vehicle that autonomously collects volcanic samples, using GPS navigation and computer vision to return to Sam. A camera mounted on its underside allows it to autonomously guide itself onto Sam’s back after collecting the sample.
Troubleshooting and Tutorials
Click the button below for more information on troubleshooting common problems with the Lavabot platform.